Caractéristiques principales:
- Catégorie: Moteur à engrenages à courant continu.
- Tension: Fonctionne généralement entre 3 V et 6 V.
- La vitesse: Ces moteurs offrent généralement des vitesses allant de 100 à 200 tr/min lorsqu'ils fonctionnent à 6 V, bien que cela puisse varier en fonction du modèle et de la tension spécifiques.
- Couple: La boîte de vitesses réduit la vitesse mais augmente le couple, ce qui les rend suffisamment puissants pour entraîner les roues ou les chenilles de petits robots.

Construction:
- Boîte de vitesses: Un réducteur est fixé au moteur. Les configurations les plus courantes sont des engrenages en plastique, qui permettent de réduire les coûts et sont suffisamment robustes pour les applications légères.
- Arbre moteur : L'arbre de sortie de la boîte de vitesses présente généralement un profil à double plat ou à coupe transversale, ce qui facilite la fixation de roues, d'engrenages ou d'autres mécanismes sans avoir recours à des accouplements supplémentaires.
- Dimensions Compact et facile à monter dans de petits projets. Les dimensions peuvent varier légèrement mais sont généralement suffisamment petites pour être utilisées dans la robotique miniature.
Applications :
- Robotique éducative : Largement utilisé dans les kits éducatifs pour les écoles et les ateliers pour enseigner les concepts de base de la robotique et de l'ingénierie.
- Projets de bricolage : Idéal pour les bricoleurs qui construisent des véhicules ou des mécanismes robotisés simples.
- Projets amateurs : Courant dans les projets de loisirs où le coût, la taille et la facilité d'utilisation sont des facteurs importants.
Câblage et contrôle :
- Fonctionnement CC simple : Ces moteurs peuvent être alimentés par une tension continue de base provenant de batteries ou contrôlés via un pilote de moteur connecté à un microcontrôleur comme un Arduino pour permettre des fonctions plus avancées comme le contrôle de la vitesse et de la direction.
- Compatibilité du pilote de moteur : Compatible avec une variété de pilotes de moteur, qui peuvent fournir la protection et le contrôle nécessaires pour la direction et la vitesse.
Exemple de configuration avec Arduino :
Voici un exemple simple de la façon dont vous pouvez contrôler un moteur TT à l'aide d'un Arduino et d'un pilote de moteur de base (comme le L298N ou le L293D) :
Composants du circuit :
- Arduino Board
- Moteur TT
- Pilote de moteur (par exemple, L298N, L293D)
- Alimentation externe (si requise par le pilote du moteur)
- fils des cavaliers
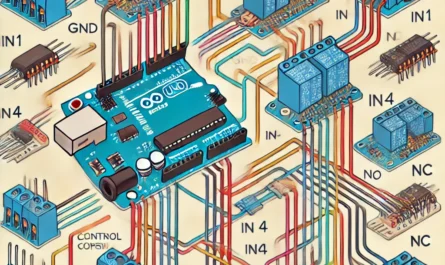
Guide de câblage de base :
- Connectez le moteur au pilote du moteur : Fixez les bornes du moteur aux sorties du module de commande du moteur.
- Connectez le pilote du moteur à l'Arduino :
- Connectez l'entrée pins sur le pilote du moteur vers l'Arduino numérique pins.
- Connectez l'activation pin sur le pilote du moteur à un PWM-capable pin sur l'Arduino si vous souhaitez contrôler la vitesse du moteur.
- Source de courant:
- Alimentez le pilote du moteur. Si vous utilisez un modèle comme le L298N, il peut nécessiter une tension plus élevée, qui doit être connectée à son entrée d'alimentation dédiée.
- Assurez-vous que la terre de l'Arduino est connectée à la terre du pilote du moteur.
- Programmation:
- Écrivez un croquis simple pour contrôler le moteur via l'Arduino, en utilisant
digitalWrite()pour définir la direction etanalogWrite()pour contrôler la vitesse si vous utilisez PWM.
- Écrivez un croquis simple pour contrôler le moteur via l'Arduino, en utilisant
// Example Arduino Code for Controlling a TT Motor
int motorPin1 = 3; // Motor pin 1 connected to digital pin 3
int motorPin2 = 4; // Motor pin 2 connected to digital pin 4
int enablePin = 5; // PWM pin for speed control
void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(enablePin, OUTPUT);
}
void loop() {
digitalWrite(motorPin1, HIGH); // Set motor direction
digitalWrite(motorPin2, LOW);
analogWrite(enablePin, 128); // Set speed (0-255)
delay(1000);
digitalWrite(motorPin1, LOW); // Reverse direction
digitalWrite(motorPin2, HIGH);
delay(1000);
}
Les moteurs TT sont un excellent choix pour ceux qui débutent en robotique ou pour tout projet où la taille, le coût et la simplicité sont des considérations clés.