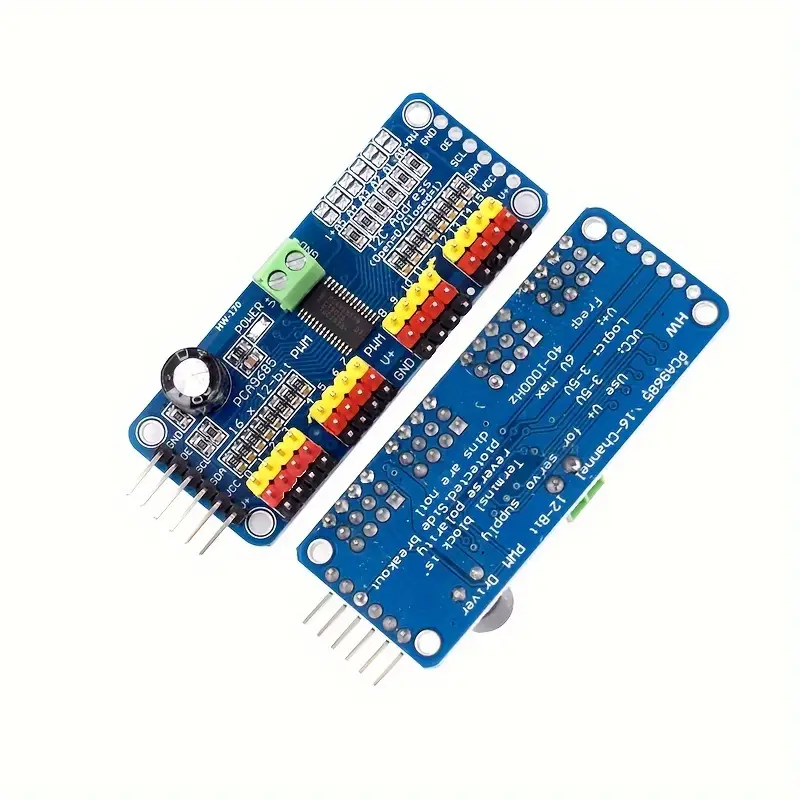
The PCA9685 is a 16-channel PWM driver that lets you control multiple servos, LEDs, or motors using only 2 wires (I2C). It’s perfect for robotics, automation, and LED control where you need precise, smooth motion without overloading your microcontroller. 🚀
Let’s break down what makes PCA9685 special, compare it to other options, and see if it’s the right choice for your project! ⚡🔧
⚡ 1. Why Use PCA9685?
✅ Main Features:
✔ 16 PWM Channels – Control up to 16 servos or LEDs with just one board.
✔ I2C Interface – Uses only 2 pins (SDA & SCL), leaving other pins free.
✔ 12-bit Resolution (4096 steps) – Very smooth servo movement & LED dimming.
✔ Independent PWM Output – Each channel runs without blocking the microcontroller.
✔ Multiple Board Support – Can chain up to 62 PCA9685 modules, controlling 992 servos! 🤯
🛠️ How It Works:
1️⃣ Your microcontroller (Arduino, ESP32, Raspberry Pi) sends I2C commands.
2️⃣ The PCA9685 generates precise PWM signals.
3️⃣ Servos, LEDs, or motors respond smoothly without CPU load.
🔥 Perfect for:
- Humanoid robots with multiple servos 🤖
- Hexapods, robotic arms, quadrupeds 🦿
- LED matrix or advanced lighting projects 💡
- RC cars, animatronics, automation 🚗
⚖️ 2. PCA9685 vs. Other PWM Solutions
🔹 PCA9685 vs. Direct PWM from Microcontroller
| Feature | PCA9685 | Microcontroller PWM (Arduino, ESP32) |
|---|---|---|
| Number of PWM Channels | ✅ 16 | ❌ Limited (Arduino: 6-8, ESP32: 16-32) |
| CPU Load | ✅ None | ❌ Uses processing power |
| Precision (12-bit) | ✅ 4096 steps | ❌ Lower (Arduino: 8-bit, ESP32: 10-16 bit) |
| I2C Control | ✅ Yes | ❌ No (direct GPIO needed) |
| Best for | Large multi-servo projects | Small projects with few servos |
🔥 Verdict: If you need many servos or LEDs, use PCA9685. If you only need a few, direct PWM is fine.
🔹 PCA9685 vs. PCA9548A (I2C Expander)
| Feature | PCA9685 | PCA9548A |
|---|---|---|
| Purpose | Servo/LED PWM | I2C Multiplexer |
| Controls | 16 PWM devices | Multiple I2C devices |
| Works with | Motors, LEDs, servos | Sensors, I2C modules |
| Best for | Robotics & lighting | Expanding I2C buses |
🔥 Verdict: PCA9685 is for controlling PWM devices, while PCA9548A is for expanding I2C connections. Different use cases!
🔹 PCA9685 vs. TLC5940 (Another PWM Controller)
| Feature | PCA9685 | TLC5940 |
|---|---|---|
| PWM Channels | ✅ 16 | ✅ 16 |
| Resolution | ✅ 12-bit | ❌ 12-bit but different scaling |
| Interface | ✅ I2C | ❌ SPI (more complex) |
| Servo Support | ✅ Yes | ❌ No (for LEDs only) |
| Best for | Servos & motors | LED fading effects |
🔥 Verdict: TLC5940 is LED-focused, while PCA9685 is servo/motor-focused. Choose based on your project needs.
🔹 PCA9685 vs. Serial Servo Controllers (e.g., Pololu Maestro)
| Feature | PCA9685 | Pololu Maestro |
|---|---|---|
| PWM Channels | ✅ 16 | ✅ 6-24 |
| Interface | ✅ I2C | ✅ Serial/USB |
| Processing Power | ❌ None (just PWM output) | ✅ Onboard processing |
| Advanced Features | ❌ No scripting | ✅ Can run servo scripts, sequences |
| Best for | Large I2C-based setups | Standalone servo control |
🔥 Verdict: Pololu Maestro is better for complex servo sequencing, but PCA9685 is great for large I2C-controlled systems.
📡 3. How to Use PCA9685 with Arduino (Basic Setup)
🛠️ Wiring:
| PCA9685 Pin | Connects To |
|---|---|
| VCC | 3.3V or 5V (Logic Power) |
| GND | GND |
| SCL | Arduino A5 (or ESP32/RPi I2C SCL) |
| SDA | Arduino A4 (or ESP32/RPi I2C SDA) |
| V+ | External 5-6V Power for Servos |
⚡ Example Code (Arduino + PCA9685 + Servo)
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pca9685 = Adafruit_PWMServoDriver(0x40);
void setup() {
Serial.begin(115200);
pca9685.begin();
pca9685.setPWMFreq(50); // Set frequency to 50Hz for servos
}
void loop() {
int servoChannel = 0; // First servo
int pulseLength = 150; // Adjust between 100-600 for movement
pca9685.setPWM(servoChannel, 0, pulseLength); // Move servo
delay(1000);
pca9685.setPWM(servoChannel, 0, 500);
delay(1000);
}
🔥 This makes controlling multiple servos EASY! 😎
🚀 Final Verdict – Is PCA9685 Right for You?
✅ Perfect for:
- Controlling lots of servos or LEDs (16+ channels).
- Saving microcontroller pins (I2C-based control).
- Robots, animatronics, and multi-motor projects.
❌ Not ideal for:
- Very high-speed PWM (not real-time fast like ESP32).
- Advanced motor control (use an H-bridge or ESC for that).
🔥 If you need smooth multi-servo control, PCA9685 is the best choice!