🔹 Step 1: Components Needed
✅ Microcontroller – ATtiny85
✅ Servo Motor – SG90 (small) or MG996R (stronger)
✅ Power Supply – 5V (for servos)
✅ Potentiometer (optional) – For manual control
✅ Jumper Wires & Breadboard
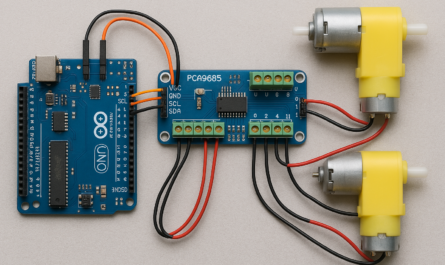
🔹 Step 2: Circuit Connection
| ATtiny85 Pin | Connected To |
|---|---|
| VCC (Pin 8) | 5V |
| GND (Pin 4) | GND |
| PB0 (Pin 5) | Servo Signal (Yellow Wire) |
| PB1 (Pin 6) | Potentiometer (Middle Pin, if used) |
🔹 Step 3: Code for Basic Servo Control
If you’re using ATtiny85, use the Servo8Bit library (because ATtiny has limited PWM).
🔹 Code for ATtiny85 (Basic Servo Movement)
#include <Servo8Bit.h>
Servo8Bit myServo; // Create servo object
void setup() {
myServo.attach(0); // Connects to PB0 (Pin 5 on ATtiny85)
}
void loop() {
myServo.write(0); // Move to 0° position
delay(1000); // Wait 1 sec
myServo.write(90); // Move to 90° position
delay(1000);
myServo.write(180); // Move to 180° position
delay(1000);
}
🔹 Step 4: Upload Code
📌 Use Arduino as ISP to burn the code
🔹 What’s Next?
✅ Once you get the servo moving, we can:
- Add a second servo for more movement
- Use a potentiometer for manual control
- Start designing a simple robotic leg or arm