

 Components Needed
Components Needed
 Arduino (Uno/Nano/etc.) SG90 Servo Motor Joystick Module (XY type, like KY-023) Jumper Wires & Breadboard
Arduino (Uno/Nano/etc.) SG90 Servo Motor Joystick Module (XY type, like KY-023) Jumper Wires & Breadboard
Understanding the Joystick
The joystick has two potentiometers (X & Y) and a push button:
- VRX (X-axis): Analog signal (A0)
- VRY (Y-axis): Analog signal (A1)
- SW (Button): Digital signal (D2, optional)
- VCC & GND: Power
For this setup, we’ll control the servo using the X-axis (left/right movement).
Circuit Connections
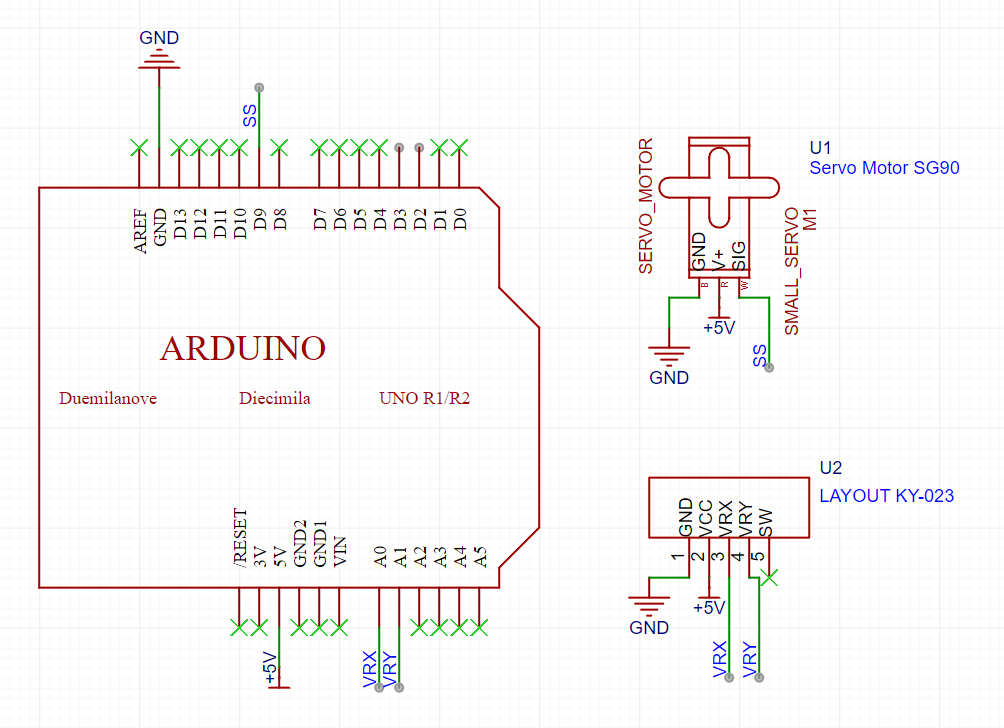
| Joystick Pin | Arduino Pin | Servo Pin |
|---|---|---|
| VCC | 5V | 5V |
| GND | GND | GND |
| VRX (X-axis) | A0 | — |
| VRY (Y-axis) | A1 (optional) | — |
| SW (Button) | D2 (optional) | — |
| — | — | Pin 9 (Servo Signal) |
Arduino Code (Joystick-Controlled Servo)
#include <Servo.h>
Servo myServo;
int joyX = A0; // Joystick X-axis connected to A0
int xValue; // Variable to store joystick reading
void setup() {
myServo.attach(9); // Servo on Pin 9
}
void loop() {
xValue = analogRead(joyX); // Read joystick X-axis (0-1023)
int angle = map(xValue, 0, 1023, 0, 180); // Convert to 0-180°
myServo.write(angle); // Move servo to the corresponding angle
delay(15); // Small delay for smooth movement
}
How to Test It?
 Wire up the circuit as shown.
Wire up the circuit as shown. Upload the code to your Arduino.
Upload the code to your Arduino. Move the joystick left & right → The servo should move accordingly!
Move the joystick left & right → The servo should move accordingly! 

What’s Next?
 Add Y-axis → Control two servos (X for one, Y for another). Use the button → Make it reset the servo to center (90°). Upgrade to a robotic arm → Control servo-based grippers or a full arm!
Add Y-axis → Control two servos (X for one, Y for another). Use the button → Make it reset the servo to center (90°). Upgrade to a robotic arm → Control servo-based grippers or a full arm!
 Broadcast the signal — amplify the connection.
Broadcast the signal — amplify the connection.
 Materials for 4D Printing: A Next-Gen Revolution
Materials for 4D Printing: A Next-Gen Revolution 





